Параметрическое задание кривой


Параметрическое задание кривой
- Кривая параметрическая Н°1.Подход к делу problem. So до сих пор мы рассматривали только 2 вида назначений кривых: уравнение v = f (x) (явная задача) или уравнение F (x, y)= O (неявная задача)).Однако теоретическая механика очень естественно приводит к различным видам линий assignments. In дело в том, что
установка движения точки-это средство нахождения положения (то есть координат) любого момента времени t. Чтобы полностью определить движение точки, определите линию, на которой будет находиться точка move. So, в этом примере линии даны с использованием
So например, эквационный х = 2Т г = 3Т-2(1) Людмила Фирмаль
2 равенств (I).Конечно, очень легко получить более знакомые задачи в той же линии. Именно так. Для любого момента x 3x /будет t = — q, t y =-2. Это соединение X и y обеспечивает явное определение линии*).Видно, что эта задача получается путем исключения времени t из Формулы (1). В рассматриваемом
примере, тот факт, что переменная T показывает время не играет никакой роли. Например, предположим, что следующие X и y зависят от вспомогательных переменных: х = Т-ФЛ, г = т Изменение его даст вам различные точки(.x, комбинация которых состоит из нескольких линий. значение t обозначается равенством t = x-1 с соответствующим значением x, поэтому y =(x-I) 1 для
- любой точки линии, и я получил явную задачу линии. Из этого видно, что вы обрабатываете 1 пару болтов. Чтобы суммировать вышесказанное, пара уравнений Где t-вспомогательная переменная, определяющая lnnnu. Способ определения этой линии называется параметрическим, а переменная t называется
параметром. за исключением t, вы получаете нормальное (явное или неявное) уравнение для той же строки. Замечание. Если функция Людмила Фирмаль
и последовательным в интервале[i, b]), является непрерывной кривой, поскольку она также может Параметрические уравнения для окружностей и эллипсов. Рассмотрим окружность с радиусом R, центрированную вокруг начала координат
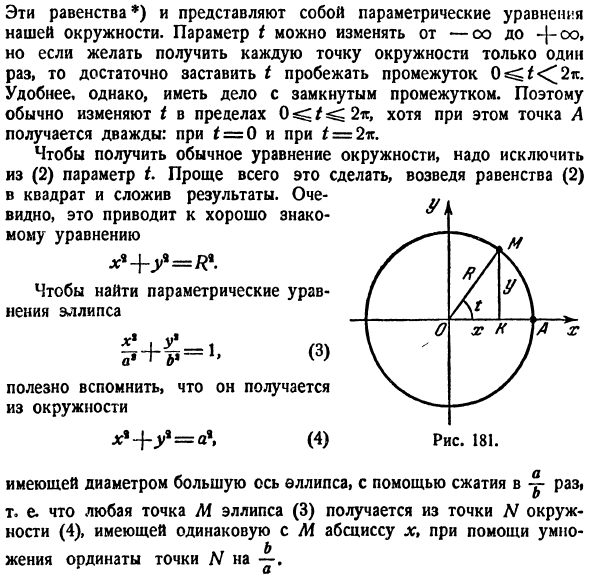
(рис.181).Положение любой точки M в этой окружности полностью определяется установкой угла f, который образуется осью Ox и радиусом OM. It естественно выразить координаты x и y точки M под этим углом. Из рисунков это сразу понятно (2) х = р COS в ТТ г = РС НТ. Эти уравнения (*) являются параметрическими
уравнениями окружности. Параметр T может быть изменен с-oo на — | — oo, но если вы хотите получить каждую точку круга по 1 разу, достаточно пройти t через зазор. Однако, это более удобно для обработки закрытых пробелов. Так, т, как правило,
изменяется в пределах 0 ^ / ^ 2ir, но точка с получает в 2 раза. T= 0 и в = 2ir. Чтобы получить нормальное уравнение окружности, необходимо исключить параметр T из (2).Это проще всего, если вы возьмете уравнение (2) на 2 квадрата и добавите результат. Очевидно, это приводит к известному уравнению Найти
параметрическое уравнение эллипса (3) Полезно помнить, что он получается из круга * * + > ■ = A (4)рисунок 181. Имеют диаметр с большой осью эллипса, иногда используют сжатие、 То есть любая точка M в эллипсе(3) берется из точки N в окружности (4). Б Ордината точки Н В соответствии с вышеизложенным
параметрическое уравнение окружности(4) имеет вид x = acos/, ^ = asin/.Но тогда понятно, что параметрическое уравнение (3) эллипса получается умножением. форма ординаты y имеет вид) (5) * = acosf, г = БС НТ. Чтобы получить все точки овала, достаточно
изменить Т выпускного вечера. Жуткий 0 ^ t ^кроме того, каждая точка эллипса, кроме точки (a, 0), получается только 1 раз, а точки(a, 0) — 2 раза (t = 0 и t = 2k).Если мы разделим первое уравнение (5) на a, а затем разделим 2-е уравнение на b, то полученное уравнение будет добавлено на 2 и станет каноническим уравнением эллипса(3).
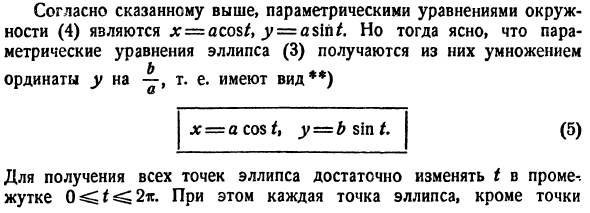
Сравнение параметрических уравнений окружности и эллипса дает удобный метод построения любого числа точек в эллипсе. То есть, пара уравнений х-acoet, у = грех Т(6) U определяет окружность с радиусом A вокруг начала координат и пару уравнений х = б сое т, у = B грех Т(7) — Окружность b с тем же центром и радиусом; чтобы получить точку (l, y), как показывает уравнение (5), p / 82.Если
вы лежите на овале, вам нужно найти x Используйте первое выражение(6) и 2-е выражение (7) с y. но эти xn-y легко найти графически, так как в формулах (6) и (7) параметром T является угол наклона радиус-вектора точки относительно оси Ox. So, чтобы составить точку M (q, y) эллипса (5), нарисуйте окружность (6) и (7)
и нарисуйте луч на оси Ox под углом t от начала координат. Найдите точки A и B пересечения этого луча и ранее упомянутой окружности и проведите через них прямую линию, параллельную оси, вы получите точку M (см. Рисунок 182).П°3.Циклоида * важные
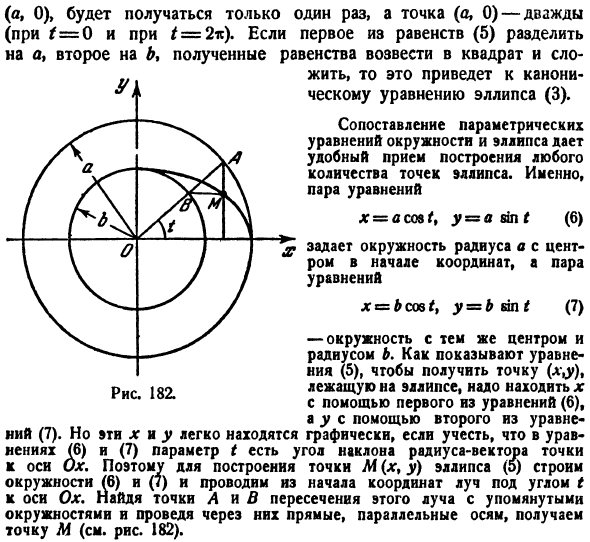
кривые-давайте познакомимся с циклоидой. Это также хороший пример параметрического определения линии. Определение циклоида представляет собой линию, которая представлена точкой окружности, которая катится без скольжения или вращения Из этого определения сразу видно, что циклоида состоит из ряда дуг, как
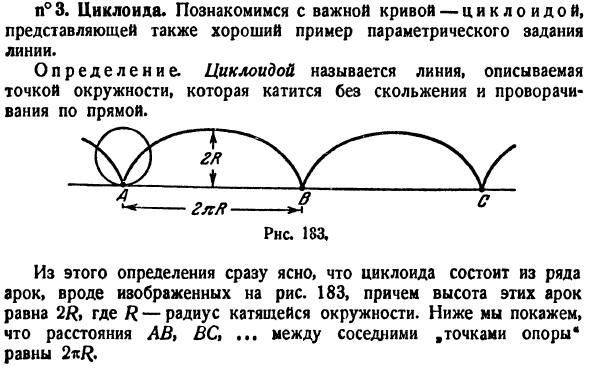
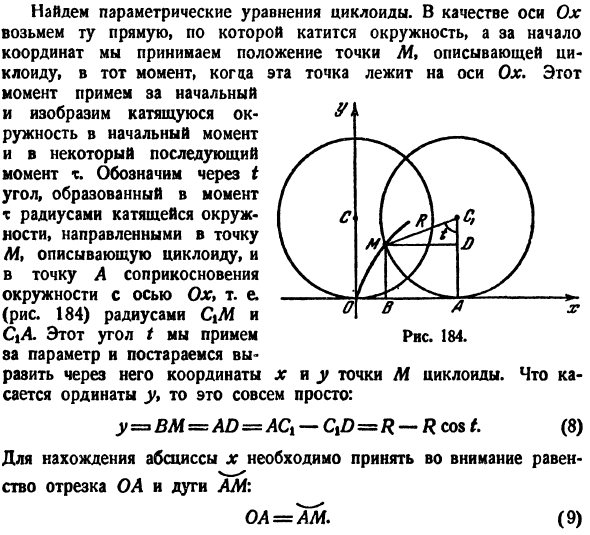
показано на рисунке 1. 183, высота этих арок равна 2R. R-радиус окружности. Ниже расстояние между соседними точками разворотаAB, BC,…равно 2π/?Это значение по умолчанию. Найдите параметрические уравнения циклоиды. В качестве оси Ox возьмите прямую линию, по которой катится круг, и для начала координат
возьмите положение точки M, которая представляет собой циклоиду острия в этой точке. Эта точка находится на оси Ox. Нарисуйте этот момент как первый момент, вращающийся круг в первый момент, а затем второй. t представляет собой угол, образованный в момент t радиусом вращающейся окружности, направленной
к точке A окружности, которая касается точки I и оси Ox, представляющей циклоиду. (Рисунок 184) радиус CXM и u ° С / а возьмем этот угол т. 184. Попробуйте параметр 8a Через него отрегулируйте точки x и y м-циклоиды. Что касается координат Y, то это довольно просто. г => ВМ = объявление = ОБК-CjZ)= /? — R cos t.
(8) Чтобы найти абсциссу X, нужно рассмотреть эквивалентность отрезка OA и дуги AM. OA = AM. (9 )) При таком равенстве окружность не будет скользить или вращаться. Следующий метод проверки эквивалентности очень очевиден(9): представьте себе катящийся круг, выполненный в виде деревянного кольца. Накройте этот обруч лентой, которая не растягивается, прибив ее правый край гвоздем
к точке O оси Ox, а левый край-к обручу. При вращении обруча лента начинает растекаться по оси Ox, и в момент t отсечение оси OA закрывается той частью ленты, которая упала вниз. С дугой AM обруч. Это*) доказывает(9). еще проще: t-значение угла AC% M, так как это Радиан、 AM = Rt Так… x = OB = OA-BA = AM-MD = Rt-Rsint (10) Если
сравнить (8)и(10), то получим параметрическое уравнение циклоиды х = р(т-Син т), г = р (- стоимость). Параметр Т может изменяться от-ОО до-Е-ОО. Пересечение начала координат и ближайших к нему справа циклоид соответствует значению Ox = t * 2.Это происходит потому, что круг качения приобретается после 1 rotation. In в этом случае
t будет n; = 2nR. In кроме того, из (11) видно, что координаты (π/,, 2/) находятся в высшей точке соответствующего cycloid. To будьте осторожны невозможно представить Y в качестве одной из основных функций Икс. И от x до y возможно| f = Arccos ^ l, но результат Формула очень трудоемкая. Параметрическое уравнение
проще. в N°4.Эвольвента circle. In в теории зацепления используется кривая, называемая эвольвентой окружности. Эвольвента окружности определения-это линия, которая описывается точкой нити и расстегивается от этой окружности, пока она прочно растянута. Предполагается, что нить неэластична и предварительно обмотана вокруг вышеуказанных кругов. Найти параметрическое
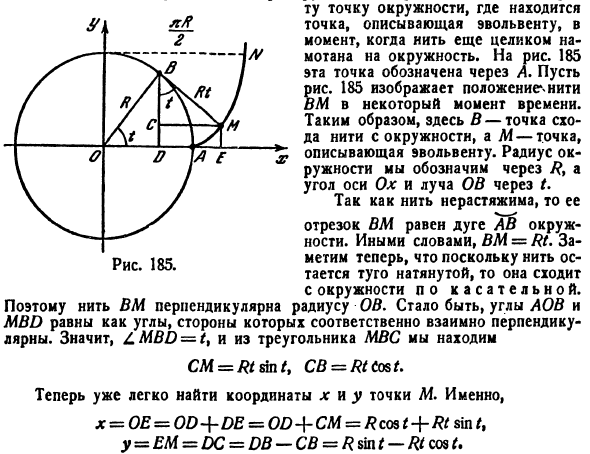
уравнение для эвольвенты circle. To сделайте это, поместите начало координат в центр круга и нарисуйте ось Ox Ноль ноль В тот момент, когда нить еще полностью обмотана вокруг окружности, точка окружности, в которой расположена точка, описывающая эвольвенту. Рисунок 185 эта точка обозначается A. 185 показывает положение потока виртуальной машины в некоторой точке в time. So, здесь B-
точка, в которой нить исчезает из окружности, а M-точка, в которой она описывает эвольвенту. Радиус окружности? Угол наклона оси Ox и Луча OB представлен через t. поскольку нить не является растяжимой、 Отрезок VM равен дуге AB окружности. То есть, BM = RT. обратите внимание, что нить остается прочно натянутой, поэтому она спускается по касательной от окружности. Таким образом,
нить VM перпендикулярна радиусу органического вещества. Поэтому углы AOB и MBD равны углам, где каждая сторона перпендикулярна друг другу. Следовательно,£МБД = T, и из треугольника МВС См = РТ грех ЦБ = стоимость РТ. Теперь вы можете легко найти X и y координаты точки м. Другими словами、 х = ое = ОД + де = ОД-ТСМ = стоимости Р + РТ грех г = ВС = ДК = ДБ-КБ = Р грех Т-РТ стоимость. Рисунок 185.Наконец. х = /?(потому что * — Ф — * грех/),; г = р (т Син-/ Кос Т), (’ Где: 0 f > = » K0(13) В точке M (x, y), соответствующей значению параметра T. To сделайте это, дайте
t приращение At и в результате получите ту же самую точку кривой AfCtf-J-A * » Y + AC) (13).Угловой коэффициент Т * Секущий MN равен или равен Важно отметить, что производная, фигурирующая в (15) , должна быть рассчитана для величины t, определяющей контакт M. Угловой коэффициент m интересующего тангенса является
пределом формулы (14) для N — + M, то есть, но так как D * — > 0 Вы будете Работать ДД: (15 )) Так… Образцы. Нарисуйте касательную к кривой + г = Тл-7т(16) Очки*)А!(2). Решение. Координаты точки M определяются из(16). xi = 17, y%=2.In сложение, x = bP—4/, y = 4P-7.So, t = 2 — Это X / = 20, yt = 25, угловой коэффициент Желаемый тангенс. Форма искомого уравнения имеет вид y-2 = 4 (l-17> Замечание.
Приведенная выше строка g:=?( * ), Y =φ (f), функция равна (t), φ (/).Если эти функции не только непрерывны, но и имеют непрерывные производные от y’0, то, как показывает уравнение (15), кривая имеет определенную касательную в каждой точке, и ее положение непрерывно изменяется с изменением контакта.
Кроме того, указанные касательные никогда не будут параллельны оси Oy. Учитывая, что координаты x и y полностью равны, линии x =
.Где f (/j u f ( / ) имеет непрерывную производную、 а В частности, под это определение подпадает линия y = f ( * ), где f (x) имеет непрерывную производную. Где роль параметра T-абсцисса ш=■»+*?> ми- Теперь зададим следующие общие вопросы: пусть
x и y зависят от вспомогательных переменных t, как показано в (13). в первом выражении (13) обозначим t из x, а затем присвоим его 2-му выражению, вы увидите, что y является функцией x, то есть y = f(x).Попробуйте найти производную этой функции. Для этого достаточно вспомнить, что интересующей нас производной является только угловой коэффициент касательной прямой y = / ( * ),
а ее параметрическим уравнением является уравнение (13).Таким образом, она задается формулой(15). Чтобы правильно понять это важное выражение, следует помнить, что точка дифференцирования t справа от (17) является значением параметра, и согласно формуле x = y (t) она соответствует точке дифференцирования x, где Y’x находится. Соотношения(17) легко получить с помощью чисто формальных
вычислений. dypy / ДТ Вау, х]’ Затем попробуйте найти 2-ю производную yx той же функции y = f (x).Это легко сделать, используя формулу (17).То есть он временно представляет y’X с Z. А затем… ** ух-з» (17) Значение (18) Однако, поскольку Z = yx = — m、 / ГМ-ГМ Узнайте, наконец, из (18)и (19) Образцы. Установите вогнутое направление
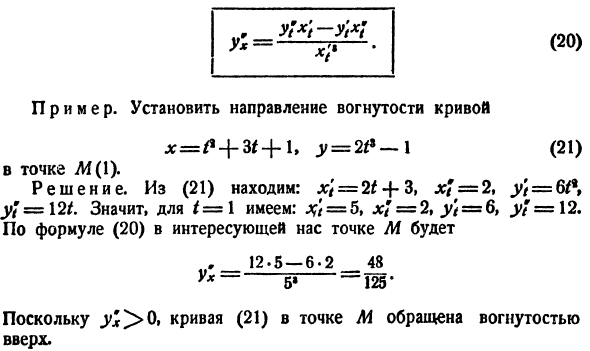
кривой х =(* + 3Т + л> г = 2Т * — (21) В точке Af (l). Решение. Из (21), x’f = 2t + 3, x? = 2,г = г г! = 12 /.Итак, если t = 1, то это выглядит так:= jc / = 2, y ’ 0, кривая точки M (21) направлена вогнутой поверхностью вверх.



Образовательный сайт для студентов и школьников
Копирование материалов сайта возможно только с указанием активной ссылки «www.lfirmal.com» в качестве источника.
© Фирмаль Людмила Анатольевна — официальный сайт преподавателя математического факультета Дальневосточного государственного физико-технического института
Параметрические уравнения прямой на плоскости: описание, примеры, решение задач
Одним из подпунктов темы «Уравнение прямой на плоскости» является вопрос составления параметрических уравнений прямой на плоскости в прямоугольной системе координат. В статье ниже рассматривается принцип составления подобных уравнений при определенных известных данных. Покажем, как от параметрических уравнений переходить к уравнениям иного вида; разберем решение типовых задач.
Вывод параметрических уравнений прямой на плоскости
Конкретная прямая может быть определена, если задать точку, которая принадлежит этой прямой, и направляющий вектор прямой.
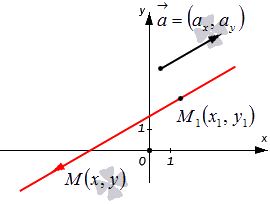
Допустим, нам задана прямоугольная система координат O x y . А также заданы прямая а с указанием лежащей на ней точки М 1 ( x 1 , y 1 ) и направляющий вектор заданной прямой a → = ( a x , a y ) . Дадим описание заданной прямой a , используя уравнения.
Используем произвольную точку М ( x , y ) и получим вектор М 1 М → ; вычислим его координаты по координатам точек начала и конца: M 1 M → = ( x — x 1 , y — y 1 ) . Опишем полученное: прямая задана множеством точек М ( x , y ) , проходит через точку М 1 ( x 1 , y 1 ) и имеет направляющий вектор a → = ( a x , a y ) . Указанное множество задает прямую только тогда, когда векторы M 1 M → = ( x — x 1 , y — y 1 ) и a → = ( a x , a y ) являются коллинеарными.
Существует необходимое и достаточное условие коллинеарности векторов, которое в данном случае для векторов M 1 M → = ( x — x 1 , y — y 1 ) и a → = ( a x , a y ) возможно записать в виде уравнения:
M 1 M → = λ · a → , где λ – некоторое действительное число.
Уравнение M 1 M → = λ · a → называют векторно-параметрическим уравнением прямой.
В координатной форме оно имеет вид:
M 1 M → = λ · a → ⇔ x — x 1 = λ · a x y — y 1 = λ · a y ⇔ x = x 1 + a x · λ y = y 1 + a y · λ
Уравнения полученной системы x = x 1 + a x · λ y = y 1 + a y · λ носят название параметрических уравнений прямой на плоскости в прямоугольной системе координат. Суть названия в следующем: координаты всех точек прямой возможно определить по параметрическим уравнениям на плоскости вида x = x 1 + a x · λ y = y 1 + a y · λ при переборе всех действительных значений параметра λ
Составление параметрических уравнений прямой на плоскости
Согласно вышесказанному, параметрические уравнения прямой на плоскости x = x 1 + a x · λ y = y 1 + a y · λ определяют прямую линию, которая задана в прямоугольной системе координат, проходит через точку М 1 ( x 1 , y 1 ) и имеет направляющий вектор a → = ( a x , a y ) . Следовательно, если заданы координаты некоторой точки прямой и координаты ее направляющего вектора, то возможно сразу записать параметрические уравнения заданной прямой.
Необходимо составить параметрические уравнения прямой на плоскости в прямоугольной системе координат, если заданы принадлежащая ей точка М 1 ( 2 , 3 ) и ее направляющий вектор a → = ( 3 , 1 ) .
Решение
На основе исходных данных получим: x 1 = 2 , y 1 = 3 , a x = 3 , a y = 1 . Параметрические уравнения будут иметь вид:
x = x 1 + a x · λ y = y 1 + a y · λ ⇔ x = 2 + 3 · λ y = 3 + 1 · λ ⇔ x = 2 + 3 · λ y = 3 + λ
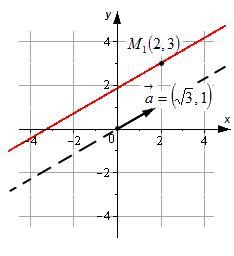
Ответ: x = 2 + 3 · λ y = 3 + λ
Необходимо отметить: если вектор a → = ( a x , a y ) служит направляющим вектором прямой а, а точки М 1 ( x 1 , y 1 ) и М 2 ( x 2 , y 2 ) принадлежат этой прямой, то ее возможно определить, задав параметрическими уравнениями вида: x = x 1 + a x · λ y = y 1 + a y · λ , а также и таким вариантом: x = x 2 + a x · λ y = y 2 + a y · λ .
К примеру, нам заданы направляющий вектор прямой a → = ( 2 , — 1 ) , а также точки М 1 ( 1 , — 2 ) и М 2 ( 3 , — 3 ) , принадлежащие этой прямой. Тогда прямую определяют параметрические уравнения: x = 1 + 2 · λ y = — 2 — λ или x = 3 + 2 · λ y = — 3 — λ .
Следует обратить внимание и на такой факт: если a → = ( a x , a y ) — направляющий вектор прямой a , то ее направляющим вектором будет и любой из векторов μ · a → = ( μ · a x , μ · a y ) , где μ ϵ R , μ ≠ 0 .
Таким образом, прямая а на плоскости в прямоугольной системе координат может быть определена параметрическими уравнениями: x = x 1 + μ · a x · λ y = y 1 + μ · a y · λ при любом значении μ , отличном от нуля.
Допустим, прямая а задана параметрическими уравнениями x = 3 + 2 · λ y = — 2 — 5 · λ . Тогда a → = ( 2 , — 5 ) — направляющий вектор этой прямой. А также любой из векторов μ · a → = ( μ · 2 , μ · — 5 ) = 2 μ , — 5 μ , μ ∈ R , μ ≠ 0 станет направляющим вектором для заданной прямой. Для наглядности рассмотрим конкретный вектор — 2 · a → = ( — 4 , 10 ) , ему соответствует значение μ = — 2 . В таком случае заданную прямую можно также определить параметрическими уравнениями x = 3 — 4 · λ y = — 2 + 10 · λ .
Переход от параметрических уравнений прямой на плоскости к прочим уравнениям заданной прямой и обратно
В решении некоторых задач применение параметрических уравнений является не самым оптимальным вариантом, тогда возникает необходимость перевода параметрических уравнений прямой в уравнения прямой другого вида. Рассмотрим, как же это сделать.
Параметрическим уравнениям прямой вида x = x 1 + a x · λ y = y 1 + a y · λ будет соответствовать каноническое уравнение прямой на плоскости x — x 1 a x = y — y 1 a y .
Разрешим каждое из параметрических уравнений относительно параметра λ , приравняем правые части полученных равенств и получим каноническое уравнение заданной прямой:
x = x 1 + a x · λ y = y 1 + a y · λ ⇔ λ = x — x 1 a x λ = y — y 1 a y ⇔ x — x 1 a x = y — y 1 a y
При этом не должно смущать, если a x или a y будут равны нулю.
Необходимо осуществить переход от параметрических уравнений прямой x = 3 y = — 2 — 4 · λ к каноническому уравнению.
Решение
Запишем заданные параметрические уравнения в следующем виде: x = 3 + 0 · λ y = — 2 — 4 · λ
Выразим параметр λ в каждом из уравнений: x = 3 + 0 · λ y = — 2 — 4 · λ ⇔ λ = x — 3 0 λ = y + 2 — 4
Приравняем правые части системы уравнений и получим требуемое каноническое уравнение прямой на плоскости:
x — 3 0 = y + 2 — 4
Ответ: x — 3 0 = y + 2 — 4
В случае, когда необходимо записать уравнение прямой вида A x + B y + C = 0 , при этом заданы параметрические уравнения прямой на плоскости, необходимо сначала осуществить переход к каноническому уравнению, а затем к общему уравнению прямой. Запишем всю последовательность действий:
x = x 1 + a x · λ y = y 1 + a y · λ ⇔ λ = x — x 1 a x λ = y — y 1 a y ⇔ x — x 1 a x = y — y 1 a y ⇔ ⇔ a y · ( x — x 1 ) = a x · ( y — y 1 ) ⇔ A x + B y + C = 0
Необходимо записать общее уравнение прямой, если заданы определяющие ее параметрические уравнения: x = — 1 + 2 · λ y = — 3 · λ
Решение
Для начала осуществим переход к каноническому уравнению:
x = — 1 + 2 · λ y = — 3 · λ ⇔ λ = x + 1 2 λ = y — 3 ⇔ x + 1 2 = y — 3
Полученная пропорция идентична равенству — 3 · ( x + 1 ) = 2 · y . Раскроем скобки и получим общее уравнение прямой: — 3 · x + 1 = 2 · y ⇔ 3 x + 2 y + 3 = 0 .
Ответ: 3 x + 2 y + 3 = 0
Следуя вышеуказанной логике действий, для получения уравнения прямой с угловым коэффициентом, уравнения прямой в отрезках или нормального уравнения прямой необходимо получить общее уравнение прямой, а от него осуществлять дальнейший переход.
Теперь рассмотрим обратное действие: запись параметрических уравнений прямой при другом заданном виде уравнений этой прямой.
Самый простой переход: от канонического уравнения к параметрическим. Пусть задано каноническое уравнение вида: x — x 1 a x = y — y 1 a y . Каждое из отношений этого равенства примем равным параметру λ :
x — x 1 a x = y — y 1 a y = λ ⇔ λ = x — x 1 a x λ = y — y 1 a y
Разрешим полученные уравнения относительно переменных x и y :
x = x 1 + a x · λ y = y 1 + a y · λ
Необходимо записать параметрические уравнения прямой, если известно каноническое уравнение прямой на плоскости: x — 2 5 = y — 2 2
Решение
Приравняем части известного уравнения к параметру λ : x — 2 5 = y — 2 2 = λ . Из полученного равенства получим параметрические уравнения прямой: x — 2 5 = y — 2 2 = λ ⇔ λ = x — 2 5 λ = y — 2 5 ⇔ x = 2 + 5 · λ y = 2 + 2 · λ
Ответ: x = 2 + 5 · λ y = 2 + 2 · λ
Когда необходимо осуществить переход к параметрическим уравнениям от заданного общего уравнения прямой, уравнения прямой с угловым коэффициентом или уравнения прямой в отрезках, необходимо исходное уравнение привести к каноническому, а после осуществлять переход к параметрическим уравнениям.
Необходимо записать параметрические уравнения прямой при известном общем уравнении этой прямой: 4 x — 3 y — 3 = 0 .
Решение
Заданное общее уравнение преобразуем в уравнение канонического вида:
4 x — 3 y — 3 = 0 ⇔ 4 x = 3 y + 3 ⇔ ⇔ 4 x = 3 y + 1 3 ⇔ x 3 = y + 1 3 4
Приравняем обе части равенства к параметру λ и получим требуемые параметрические уравнения прямой:
x 3 = y + 1 3 4 = λ ⇔ x 3 = λ y + 1 3 4 = λ ⇔ x = 3 · λ y = — 1 3 + 4 · λ
Ответ: x = 3 · λ y = — 1 3 + 4 · λ
Примеры и задачи с параметрическими уравнениями прямой на плоскости
Рассмотрим чаще всего встречаемые типы задач с использованием параметрических уравнений прямой на плоскости в прямоугольной системе координат.
- В задачах первого типа заданы координаты точек, принадлежащих или нет прямой, описанной параметрическими уравнениями.
Решение таких задач опирается на следующий факт: числа ( x , y ) , определяемые из параметрических уравнений x = x 1 + a x · λ y = y 1 + a y · λ при некотором действительном значении λ , являются координатами точки, принадлежащей прямой, которая описывается этими параметрическими уравнениями.
Необходимо определить координаты точки, которая лежит на прямой, заданной параметрическими уравнениями x = 2 — 1 6 · λ y = — 1 + 2 · λ при λ = 3 .
Решение
Подставим в заданные параметрические уравнения известное значение λ = 3 и осуществим вычисление искомых координат: x = 2 — 1 6 · 3 y = — 1 + 2 · 3 ⇔ x = 1 1 2 y = 5
Ответ: 1 1 2 , 5
Также возможна следующая задача: пусть задана некоторая точка M 0 ( x 0 , y 0 ) на плоскости в прямоугольной системе координат и нужно определить, принадлежит ли эта точка прямой, описываемой параметрическими уравнениями x = x 1 + a x · λ y = y 1 + a y · λ .
Чтобы решить подобную задачу, необходимо подставить координаты заданной точки в известные параметрические уравнения прямой. Если будет определено, что возможно такое значение параметра λ = λ 0 , при котором будут верными оба параметрических уравнения, тогда заданная точка является принадлежащей заданной прямой.
Заданы точки М 0 ( 4 , — 2 ) и N 0 ( — 2 , 1 ) . Необходимо определить, являются ли они принадлежащими прямой, определенной параметрическими уравнениями x = 2 · λ y = — 1 — 1 2 · λ .
Решение
Подставим координаты точки М 0 ( 4 , — 2 ) в заданные параметрические уравнения:
4 = 2 · λ — 2 = — 1 — 1 2 · λ ⇔ λ = 2 λ = 2 ⇔ λ = 2
Делаем вывод, что точка М 0 принадлежит заданной прямой, т.к. соответствует значению λ = 2 .
Далее по аналогии проверим заданную точку N 0 ( — 2 , 1 ) , подставив ее координаты в заданные параметрические уравнения:
— 2 = 2 · λ 1 = — 1 — 1 2 · λ ⇔ λ = — 1 λ = — 4
Очевидно, что не существует такого параметра λ , которому будет соответствовать точка N 0 . Другими словами, заданная прямая не проходит через точку N 0 ( — 2 , 1 ) .
Ответ: точка М 0 принадлежит заданной прямой; точка N 0 не принадлежит заданной прямой.
- В задачах второго типа требуется составить параметрические уравнения прямой на плоскости в прямоугольной системе координат. Самый простой пример такой задачи (при известных координатах точки прямой и направляющего вектора) был рассмотрен выше. Теперь разберем примеры, в которых сначала нужно найти координаты направляющего вектора, а потом записать параметрические уравнения.
Пример 8
Задана точка M 1 1 2 , 2 3 . Необходимо составить параметрические уравнения прямой, проходящей через эту точку и параллельной прямой x 2 = y — 3 — 1 .
Решение
По условию задачи прямая, уравнение которой нам предстоит опередить, параллельна прямой x 2 = y — 3 — 1 . Тогда в качестве направляющего вектора прямой, проходящей через заданную точку, возможно использовать направляющий вектор прямой x 2 = y — 3 — 1 , который запишем в виде: a → = ( 2 , — 1 ) . Теперь известны все необходимые данные для того, чтобы составить искомые параметрические уравнения:
x = x 1 + a x · λ y = y 1 + a y · λ ⇔ x = 1 2 + 2 · λ y = 2 3 + ( — 1 ) · λ ⇔ x = 1 2 + x · λ y = 2 3 — λ
Ответ: x = 1 2 + x · λ y = 2 3 — λ .
Задана точка М 1 ( 0 , — 7 ) . Необходимо записать параметрические уравнения прямой, проходящей через эту точку перпендикулярно прямой 3 x – 2 y – 5 = 0 .
Решение
В качестве направляющего вектора прямой, уравнение которой надо составить, возможно взять нормальный вектор прямой 3 x – 2 y – 5 = 0 . Его координаты ( 3 , — 2 ) . Запишем требуемые параметрические уравнения прямой:
x = x 1 + a x · λ y = y 1 + a y · λ ⇔ x = 0 + 3 · λ y = — 7 + ( — 2 ) · λ ⇔ x = 3 · λ y = — 7 — 2 · λ
Ответ: x = 3 · λ y = — 7 — 2 · λ
- В задачах третьего типа требуется осуществить переход от параметрических уравнений заданной прямой к прочим видам уравнений, которые ее определяют. Решение подобных примеров мы рассматривали выше, приведем еще один.
Пример 10
Дана прямая на плоскости в прямоугольной системе координат, определяемая параметрическими уравнениями x = 1 — 3 4 · λ y = — 1 + λ . Необходимо найти координаты какого-либо нормального вектора этой прямой.
Решение
Чтобы определить искомые координаты нормального вектора, осуществим переход от параметрических уравнений к общему уравнению:
x = 1 — 3 4 · λ y = — 1 + λ ⇔ λ = x — 1 — 3 4 λ = y + 1 1 ⇔ x — 1 — 3 4 = y + 1 1 ⇔ ⇔ 1 · x — 1 = — 3 4 · y + 1 ⇔ x + 3 4 y — 1 4 = 0
Коэффициенты переменных x и y дают нам требуемые координаты нормального вектора. Таким образом, нормальный вектор прямой x = 1 — 3 4 · λ y = — 1 + λ имеет координаты 1 , 3 4 .
Элементы дифференциальной геометрии. Естественная параметризация
Содержание:






По этой ссылке вы найдёте полный курс лекций по математике:
Наглядный геометрический объест — плоская кривая — приточных определениях приводит к нескольким различным, хотя и близким понятиям. Плоскую кривую можно понимать и как некоторое множество точек на плоскости и как множество точек плоскости вместе с очередностью их прохождения — ориентацией. Приведем два наиболее распространенных подхода к определению того, что представля ет собой плоская кривая. Пусть на плоскости введена прямоугольная декартова система координат Оху.
Определение 1 (неявный способ задания):
Плоской кривой называется множество 7 точек М плоскости, координаты х и у которых при подстановке в уравнение ЭЛЕМЕНТЫ ДИФФЕРЕНЦИАЛЬНОЙ ГЕОМЕТРИИ Плоские кривые. Способы задания. Естественная параметризация обращают его в тождество. Пример 1 Уравнение , задает окружность радиуса а с центром в точке 0(0,0) <рис. 1).
Другим распространенным способом задания плоской кривой является параметрический способ задания. Определение 2. Параметризованной плоской кривой называется множество 7 точек М плоскости, координаты г и у которых определяются соотношениями непрерывные на отрезке [а, 6] функции. Пример 2. — параметрические уравнения окружности радиуса а с центром в точке 0(0,0). При изменении параметра t от 0 до 2т соответствующая точка обегает окружность против часовой стрелки.
Данное определение допускает естественную физическую интерпретацию. Если воспринимать параметр t как время, то параметрически заданную кривую можно рассматривать как след движущейся точки М(х, у), координаты которой изменяются со временем по правилу (2). При этом вовсе не исключается случай, когда при своем движении переменная точка М в некоторый момент t* может вновь оказаться там, где ранее (в момент i, она уже находилась: (рис.2). Геометрически этоодна и та же точка.
Однако вследствие того, что в рассматриваемом процессе мы попадаем в нее дважды в разные моменты времени, это две разные точки кривой, задаваемой параметрическими уравнениями (2). Замечание. Строго говоря, определении I и 2 вводят в рассмотрение разные объекты. Поэтому для того, чтобы не впасть в заблуждение, нужно ясно представлять, в каком именно смысле рассматривается задаваемая кривая. Пусть кривая 7 задана параметрическими уравнениями называется начальной тонкой этой кривой, а точка ) — конечной тонкой кривой 7.
Кривая 7 называется замкнутой, если ее начальная и конечная точки совпадают (рис. 4).
— Рис. 4 Одно и то же м ножество точекн а плоскости можно задавать при помощи различных параметрических уравнений. Пример 3. Уравнения задают окружность радиуса а, обходимую в положительном направлении. Легко видеть, что, положив в формулах (3) 2хг3, мы приходим к соотношениям (4). Определение. Функция подчиненная условиям: а) Н<т) непрерывна на отрезке [а, /3]; h(r) строго возрастает на отрезке [се, >3]; в) область значения функции h(r) — отрезок [а, Ь], называется непрерывной заменой параметра кривой 7 (рис. 5). ЭЛЕМЕНТЫ ДИФФЕРЕНЦИАЛЬНОЙ ГЕОМЕТРИИ Плоские кривые.
Способы задания
Естественная параметризация Заменяя в формулах (2) параметр t на функцию Л(т), получаем уравнения — другую параметризацию кривой 7. Любую кривую можно параметризовать многими различными способами. Определение 3. Плоская кривая 7 называется п-гладкой относительно параметризации если функции ) принадлежит классу .
Если порядок п гладкости функций несуществен, то говорят просто о гладкой кривой. Пример 4. Кривая заданная уравнениями является 3-гладкой (рис. в а). Пример S. Кривая 7, заданная уравнениями является 2-гладкой. Однако множеств о точек на плоскости, описываемое этими уравнениями, имеет • точке О (при t ) особенность — излом (рис.вб). Это означает, что гладкость функций . задающих кривую, не обеспечивает плавного ее изменения.
Отметим, что производные этих функций при tодновременно обращаются а нуль. ТЪчка Мо гладкой кривой у, отвечающая значению t0 параметра, М0 в которой называется особой точкой этой кривой (относительно заданной параметризации). Точка Мо(*о) гладкой кривой 7, в которой называется обыкновенной, ншрегулярной, точкой этой кривой. Пример в. Все точки окружности (3) являются регулярными.
Пример 7. У кривой, задаваемой уравнениями (астроида) четыре особых точки (при t ж 0, | Последнее неравенство означает, что скорость кривой 7 относительно заданной параметризации не обращается в нуль ни в одной точке кривой. При изменении параметра t текущая точка M(t) перемещается порегулярной кривой 7, нигде не оста- навливаясь и не поворачивая вспять, поскольку скорость регулярной кривой ни при каких значениях параметра не обращается в нуль.
Возможно вам будут полезны данные страницы:
Пусть 7 — регулярная кривая, заданная параметрически. Обозначим через Мо точку кривой 7, отвечающую значению £о параметра, а через М — точку кривой 7, отвечающую значению t параметра из некоторой окрестности точки to (рис. 8, 9). Прямая М0Т называется касательной регулярной кривой 7 вточке Мо, если при (или, что то же, ) наименьший Д0 из углов между этой прямой и переменной прямой MqM стремится к нулю (рис. 9). Регулярная кривая имеет касательную в каждой своей точке.
Вектор скорости кривой в точке Мо коллинеарен ее ка- сательной в этой точке. Прямая, проходящая через точку Мо перпендикулярно касательной кривой 7 в этой точке, называется нормалью кривой вточке Мо. Замена параметра называется регулярной у если Л'(т во всех точках отрезка [а, /3]. В случае неявного задания (1) кривая 7 будет регулярной, если в каждой ее точке М(х, у) выполняется неравенство Точка Мо(жо> Уо) неявно заданной кривой 7 называется особой, если в этой точке Пример 8.
Кривая, заданная уравнением
(леммисюга Бернулт), имеет одну особую точку 0(0,0) — узел (рис.10). Различают несколько типов особых точек. Пусть М0(хо, уо) — особая точка кривой 7, Введем следующие обозначения возврата первого рода. Пример 12. (рис. 14). — точка возврата второго рода. Гладкая (тем более регулярная) кривая спрямляема. Длина кривой 7, заданной уравнениями (2), вычисляется по формуле Значение функции равно длине переменной дуги кривой7, заключенной между точками (рис. 15).
Функция на отрезке [а, 6) строго возрастает, Пример 11. ЭЛЕМЕНТЫ ДИФФЕРЕНЦИАЛЬНОЙ ГЕОМЕТРИИ Плоские кривые. Способы задания. Естественная параметризация и является гладкой на отрезке [а, 6]. Кроме того, область значений функции s(t) совпадает с отрезком [0, 5]. Тем самым, длину дуги можно взять за новый, естественный (натуральный) параметр кривой.
Параметризация кривой, где в качестве параметра взята длина дуги з, называется естественной параметризацией. Если естественная параметризация кривой, то Поэтому естественно параметризованную кривую часто называют кривой с единичной скоростью. Пример 13. Параметризация окружности радиусе а является естественной:
Присылайте задания в любое время дня и ночи в ➔ 

Официальный сайт Брильёновой Натальи Валерьевны преподавателя кафедры информатики и электроники Екатеринбургского государственного института.
Все авторские права на размещённые материалы сохранены за правообладателями этих материалов. Любое коммерческое и/или иное использование кроме предварительного ознакомления материалов сайта natalibrilenova.ru запрещено. Публикация и распространение размещённых материалов не преследует за собой коммерческой и/или любой другой выгоды.
Сайт предназначен для облегчения образовательного путешествия студентам очникам и заочникам по вопросам обучения . Наталья Брильёнова не предлагает и не оказывает товары и услуги.
источники:
http://zaochnik.com/spravochnik/matematika/prjamaja-ploskost/parametricheskie-uravnenija-prjamoj-na-ploskosti/
http://natalibrilenova.ru/elementyi-differentsialnoj-geometrii-estestvennaya-parametrizatsiya-/
Макеты страниц
При отыскании уравнения геометрического места по данному его свойству не всегда бывает удобно или возможно выразить это свойство непосредственно в виде уравнения, связывающего текущие координаты х, у. В таком случае бывает полезно ввести третью, вспомогательную переменную величину, через которую можно выразить отдельно абсциссу х и ординату у любой точки геометрического места.
Совокупность двух полученных таким путем уравнений

также может служить для построения и исследования кривой, так как при каждом значении t она определяет положение соответствующей точки кривой.
Такой способ задания кривой называется параметрическим, вспомогательная же переменная t — параметром. Для получения Уравнения кривой в обычном (явном или неявном) виде как зависимости, связывающей х и у, нужно из двух уравнений (9) исключить параметр t, что можно сделать, хотя бы решив одно из этих Уравнений относительно t и подставив полученный результат в другое.
С параметрическим заданием кривых особенно часто приходится иметь дело в механике, при исследовании траектории движущейся точки, положение которой зависит от времени  , а потому и координаты суть функции от t. Определив эти функции, мы и получим параметрическое задание траектории.
, а потому и координаты суть функции от t. Определив эти функции, мы и получим параметрическое задание траектории.
Так, например, параметрическое уравнение окружности с центром в точке  и радиусом
и радиусом  будет
будет

Перепишем эти уравнения:

Возводя обе части в квадрат и складывая, исключим парамегр t и получим обычное уравнение окружности

Точно так же непосредственно ясно, что

есть параметрическое уравнение эллипса

Положим, что у, как функция от  , определена параметрически формулами (9).
, определена параметрически формулами (9).
Приращение параметра  вызовет соответствующие приращения
вызовет соответствующие приращения  и мы получим, деля числитель и знаменатель дроби на
и мы получим, деля числитель и знаменатель дроби на  следующее выражение для производной от у до
следующее выражение для производной от у до 

или

Составим вторую производную от у по х:

Применяя правило нахождения дифференциала частного, получим [50]

Но, в силу (9),

Подставляя это в (13) и сокращая на  получим окончательно
получим окончательно

Заметим, что выражение  по формуле (13) отличается от выражения той же производной по формуле (3) из
по формуле (13) отличается от выражения той же производной по формуле (3) из 

потому что это последняя формула выведена лишь в том предположении, что  есть независимая переменная, а при параметрическом представлении (9) независимой переменной является t. Если х есть независимая переменная, то dx считается уже постоянным [50], т. е. не зависящим от
есть независимая переменная, а при параметрическом представлении (9) независимой переменной является t. Если х есть независимая переменная, то dx считается уже постоянным [50], т. е. не зависящим от  как дифференциал постоянной. При этом формула (13) переходит в (15).
как дифференциал постоянной. При этом формула (13) переходит в (15).
Имея возможность определить у и  мы тем самым можем решить вопрос о направлении касательной к кривой, о выпуклости и вогнутости кривой и т. д.
мы тем самым можем решить вопрос о направлении касательной к кривой, о выпуклости и вогнутости кривой и т. д.
В качестве примера рассмотрим кривую, заданную уравнением

и называемую «листом Декарта».
Введем переменный параметр t, полагая

и рассмотрим точки пересечения прямой (17) с переменным угловым коэффициентом t и кривой (16). Подставляя в уравнение (16) выражение у из уравнения (17) и сокращая на  , получим
, получим

а уравнение (17) даст нам тогда

Эти уравнения дают параметрическую форму представления листа Декарта. Определим производные от х и у по 

Для исследования изменения х и у разобьем весь промежуток  изменения t на такие отдельные части, внутри которых производные
изменения t на такие отдельные части, внутри которых производные  сохраняют неизменный знак и не обращаются в бесконечность. Для этого нам придется отметить значения:
сохраняют неизменный знак и не обращаются в бесконечность. Для этого нам придется отметить значения:

при которых эти производные обращаются в нуль или бесконечность. Знаки  внутри этих промежутков определятся без труда по формулам (18); вычислив значения х и у на концах промежутков, мы получим, таким образом, приведенную ниже таблицу.
внутри этих промежутков определятся без труда по формулам (18); вычислив значения х и у на концах промежутков, мы получим, таким образом, приведенную ниже таблицу.
В соответствии с этой схемой мы получим кривую, изображенную на рис. 85.

Рис. 85.

Для вычисления углового коэффициента касательной имеем формулу

Обратим внимание на то, что  обращаются в нуль при
обращаются в нуль при  и кривая, как это видно из чертежа, пересекает сама себя в начале координат.
и кривая, как это видно из чертежа, пересекает сама себя в начале координат.
Формула (19) дает нам

т. е. две ветви кривой, взаимно пересекающиеся в начале координат, касаются — одна оси ОХ и другая оси 
При стремлении t к  и у стремятся к бесконечности, и кривая имеет бесконечную ветвь. Определим асимптоту:
и у стремятся к бесконечности, и кривая имеет бесконечную ветвь. Определим асимптоту:
угловой коэффициент асимптоты равен  ,
,

т. e. уравнение асимптоты будет

Параметрическое задание кривой
- Кривая параметрическая Н°1.Подход к делу problem. So до сих пор мы рассматривали только 2 вида назначений кривых: уравнение v = f (x) (явная задача) или уравнение F (x, y)= O (неявная задача)).Однако теоретическая механика очень естественно приводит к различным видам линий assignments. In дело в том, что
установка движения точки-это средство нахождения положения (то есть координат) любого момента времени t. Чтобы полностью определить движение точки, определите линию, на которой будет находиться точка move. So, в этом примере линии даны с использованием
So например, эквационный х = 2Т г = 3Т-2(1)
Людмила Фирмаль
2 равенств (I).Конечно, очень легко получить более знакомые задачи в той же линии. Именно так. Для любого момента x 3x /будет t = — q, t y =-2. Это соединение X и y обеспечивает явное определение линии*).Видно, что эта задача получается путем исключения времени t из Формулы (1). В рассматриваемом
примере, тот факт, что переменная T показывает время не играет никакой роли. Например, предположим, что следующие X и y зависят от вспомогательных переменных: х = Т-ФЛ, г = т Изменение его даст вам различные точки(.x, комбинация которых состоит из нескольких линий. значение t обозначается равенством t = x-1 с соответствующим значением x, поэтому y =(x-I) 1 для
- любой точки линии, и я получил явную задачу линии. Из этого видно, что вы обрабатываете 1 пару болтов. Чтобы суммировать вышесказанное, пара уравнений Где t-вспомогательная переменная, определяющая lnnnu. Способ определения этой линии называется параметрическим, а переменная t называется
параметром. за исключением t, вы получаете нормальное (явное или неявное) уравнение для той же строки. Замечание. Если функция < p (/) уравнения ( * ) задана и непрерывна с определенным интервалом p, q, то линия, определяемая этими уравнениями, называется непрерывной curve. In в частности, линия, определяемая уравнением y = sf (x) (заданным f (x)
быть определена уравнением. х = т, у = F(т) (а ^ т ^ б). н°2.
Людмила Фирмаль
и последовательным в интервале[i, b]), является непрерывной кривой, поскольку она также может Параметрические уравнения для окружностей и эллипсов. Рассмотрим окружность с радиусом R, центрированную вокруг начала координат
(рис.181).Положение любой точки M в этой окружности полностью определяется установкой угла f, который образуется осью Ox и радиусом OM. It естественно выразить координаты x и y точки M под этим углом. Из рисунков это сразу понятно (2) х = р COS в ТТ г = РС НТ. Эти уравнения (*) являются параметрическими
уравнениями окружности. Параметр T может быть изменен с-oo на — | — oo, но если вы хотите получить каждую точку круга по 1 разу, достаточно пройти t через зазор. Однако, это более удобно для обработки закрытых пробелов. Так, т, как правило,
изменяется в пределах 0 ^ / ^ 2ir, но точка с получает в 2 раза. T= 0 и в = 2ir. Чтобы получить нормальное уравнение окружности, необходимо исключить параметр T из (2).Это проще всего, если вы возьмете уравнение (2) на 2 квадрата и добавите результат. Очевидно, это приводит к известному уравнению Найти
параметрическое уравнение эллипса (3) Полезно помнить, что он получается из круга * * + > ■ = A (4)рисунок 181. Имеют диаметр с большой осью эллипса, иногда используют сжатие、 То есть любая точка M в эллипсе(3) берется из точки N в окружности (4). Б Ордината точки Н В соответствии с вышеизложенным
параметрическое уравнение окружности(4) имеет вид x = acos/, ^ = asin/.Но тогда понятно, что параметрическое уравнение (3) эллипса получается умножением. форма ординаты y имеет вид) (5) * = acosf, г = БС НТ. Чтобы получить все точки овала, достаточно
изменить Т выпускного вечера. Жуткий 0 ^ t ^кроме того, каждая точка эллипса, кроме точки (a, 0), получается только 1 раз, а точки(a, 0) — 2 раза (t = 0 и t = 2k).Если мы разделим первое уравнение (5) на a, а затем разделим 2-е уравнение на b, то полученное уравнение будет добавлено на 2 и станет каноническим уравнением эллипса(3).
Сравнение параметрических уравнений окружности и эллипса дает удобный метод построения любого числа точек в эллипсе. То есть, пара уравнений х-acoet, у = грех Т(6) U определяет окружность с радиусом A вокруг начала координат и пару уравнений х = б сое т, у = B грех Т(7) — Окружность b с тем же центром и радиусом; чтобы получить точку (l, y), как показывает уравнение (5), p / 82.Если
вы лежите на овале, вам нужно найти x Используйте первое выражение(6) и 2-е выражение (7) с y. но эти xn-y легко найти графически, так как в формулах (6) и (7) параметром T является угол наклона радиус-вектора точки относительно оси Ox. So, чтобы составить точку M (q, y) эллипса (5), нарисуйте окружность (6) и (7)
и нарисуйте луч на оси Ox под углом t от начала координат. Найдите точки A и B пересечения этого луча и ранее упомянутой окружности и проведите через них прямую линию, параллельную оси, вы получите точку M (см. Рисунок 182).П°3.Циклоида * важные
кривые-давайте познакомимся с циклоидой. Это также хороший пример параметрического определения линии. Определение циклоида представляет собой линию, которая представлена точкой окружности, которая катится без скольжения или вращения Из этого определения сразу видно, что циклоида состоит из ряда дуг, как
показано на рисунке 1. 183, высота этих арок равна 2R. R-радиус окружности. Ниже расстояние между соседними точками разворотаAB, BC,…равно 2π/?Это значение по умолчанию. Найдите параметрические уравнения циклоиды. В качестве оси Ox возьмите прямую линию, по которой катится круг, и для начала координат
возьмите положение точки M, которая представляет собой циклоиду острия в этой точке. Эта точка находится на оси Ox. Нарисуйте этот момент как первый момент, вращающийся круг в первый момент, а затем второй. t представляет собой угол, образованный в момент t радиусом вращающейся окружности, направленной
к точке A окружности, которая касается точки I и оси Ox, представляющей циклоиду. (Рисунок 184) радиус CXM и u ° С / а возьмем этот угол т. 184. Попробуйте параметр 8a Через него отрегулируйте точки x и y м-циклоиды. Что касается координат Y, то это довольно просто. г => ВМ = объявление = ОБК-CjZ)= /? — R cos t.
(8) Чтобы найти абсциссу X, нужно рассмотреть эквивалентность отрезка OA и дуги AM. OA = AM. (9 )) При таком равенстве окружность не будет скользить или вращаться. Следующий метод проверки эквивалентности очень очевиден(9): представьте себе катящийся круг, выполненный в виде деревянного кольца. Накройте этот обруч лентой, которая не растягивается, прибив ее правый край гвоздем
к точке O оси Ox, а левый край-к обручу. При вращении обруча лента начинает растекаться по оси Ox, и в момент t отсечение оси OA закрывается той частью ленты, которая упала вниз. С дугой AM обруч. Это*) доказывает(9). еще проще: t-значение угла AC% M, так как это Радиан、 AM = Rt Так… x = OB = OA-BA = AM-MD = Rt-Rsint (10) Если
сравнить (8)и(10), то получим параметрическое уравнение циклоиды х = р(т-Син т), г = р (- стоимость). Параметр Т может изменяться от-ОО до-Е-ОО. Пересечение начала координат и ближайших к нему справа циклоид соответствует значению Ox = t * 2.Это происходит потому, что круг качения приобретается после 1 rotation. In в этом случае
t будет n; = 2nR. In кроме того, из (11) видно, что координаты (π/,, 2/) находятся в высшей точке соответствующего cycloid. To будьте осторожны невозможно представить Y в качестве одной из основных функций Икс. И от x до y возможно| f = Arccos ^ l, но результат Формула очень трудоемкая. Параметрическое уравнение
проще. в N°4.Эвольвента circle. In в теории зацепления используется кривая, называемая эвольвентой окружности. Эвольвента окружности определения-это линия, которая описывается точкой нити и расстегивается от этой окружности, пока она прочно растянута. Предполагается, что нить неэластична и предварительно обмотана вокруг вышеуказанных кругов. Найти параметрическое
уравнение для эвольвенты circle. To сделайте это, поместите начало координат в центр круга и нарисуйте ось Ox Ноль ноль В тот момент, когда нить еще полностью обмотана вокруг окружности, точка окружности, в которой расположена точка, описывающая эвольвенту. Рисунок 185 эта точка обозначается A. 185 показывает положение потока виртуальной машины в некоторой точке в time. So, здесь B-
точка, в которой нить исчезает из окружности, а M-точка, в которой она описывает эвольвенту. Радиус окружности? Угол наклона оси Ox и Луча OB представлен через t. поскольку нить не является растяжимой、 Отрезок VM равен дуге AB окружности. То есть, BM = RT. обратите внимание, что нить остается прочно натянутой, поэтому она спускается по касательной от окружности. Таким образом,
нить VM перпендикулярна радиусу органического вещества. Поэтому углы AOB и MBD равны углам, где каждая сторона перпендикулярна друг другу. Следовательно,£МБД = T, и из треугольника МВС См = РТ грех ЦБ = стоимость РТ. Теперь вы можете легко найти X и y координаты точки м. Другими словами、 х = ое = ОД + де = ОД-ТСМ = стоимости Р + РТ грех г = ВС = ДК = ДБ-КБ = Р грех Т-РТ стоимость. Рисунок 185.Наконец. х = /?(потому что * — Ф — * грех/),; г = р (т Син-/ Кос Т), (’ Где: 0 f < — f-co. Легко видеть, что Эвольвента круга
представляет собой spiral. It показано на рисунке. 185 баллов N соответствует значению t шп п Итак, его координаты g= -, y-Rt, но это очевидно и сразу очевидно. Интересно отметить, что определение эвольвенты в круге является в некотором смысле определением циклоиды и»двойника».То есть, если вы рисуете касательную к точке а в точке А и начинаете вращаться вокруг окружности, то в момент, когда точка касательной перемещается в точку в, точка А (которая
считается точкой касательной) становится позицией м. Таким образом, эвольвентный круг представляет собой линию, которая представлена тонкой линией, когда последняя катит круг (без скольжения). П°5.Параметрический дифференциал. Предположим, вы хотите нарисовать касательную к кривой, определяемой параметрическим уравнением * = T(0,>> = » K0(13) В точке M (x, y), соответствующей значению параметра T. To сделайте это, дайте
t приращение At и в результате получите ту же самую точку кривой AfCtf-J-A * » Y + AC) (13).Угловой коэффициент Т * Секущий MN равен или равен Важно отметить, что производная, фигурирующая в (15) , должна быть рассчитана для величины t, определяющей контакт M. Угловой коэффициент m интересующего тангенса является
пределом формулы (14) для N — + M, то есть, но так как D * — > 0 Вы будете Работать ДД: (15 )) Так… Образцы. Нарисуйте касательную к кривой + г = Тл-7т(16) Очки*)А!(2). Решение. Координаты точки M определяются из(16). xi = 17, y%=2.In сложение, x = bP—4/, y = 4P-7.So, t = 2 — Это X / = 20, yt = 25, угловой коэффициент Желаемый тангенс. Форма искомого уравнения имеет вид y-2 = 4 (l-17> Замечание.
Приведенная выше строка g:=?( * ), Y =φ (f), функция равна (t), φ (/).Если эти функции не только непрерывны, но и имеют непрерывные производные от y’0, то, как показывает уравнение (15), кривая имеет определенную касательную в каждой точке, и ее положение непрерывно изменяется с изменением контакта.
Кроме того, указанные касательные никогда не будут параллельны оси Oy. Учитывая, что координаты x и y полностью равны, линии x =
.Где f (/j u f ( / ) имеет непрерывную производную、 <Р ’»<0 + р»)> а В частности, под это определение подпадает линия y = f ( * ), где f (x) имеет непрерывную производную. Где роль параметра T-абсцисса ш=■»+*?> ми- Теперь зададим следующие общие вопросы: пусть
x и y зависят от вспомогательных переменных t, как показано в (13). в первом выражении (13) обозначим t из x, а затем присвоим его 2-му выражению, вы увидите, что y является функцией x, то есть y = f(x).Попробуйте найти производную этой функции. Для этого достаточно вспомнить, что интересующей нас производной является только угловой коэффициент касательной прямой y = / ( * ),
а ее параметрическим уравнением является уравнение (13).Таким образом, она задается формулой(15). Чтобы правильно понять это важное выражение, следует помнить, что точка дифференцирования t справа от (17) является значением параметра, и согласно формуле x = y (t) она соответствует точке дифференцирования x, где Y’x находится. Соотношения(17) легко получить с помощью чисто формальных
вычислений. dypy / ДТ Вау, х]’ Затем попробуйте найти 2-ю производную yx той же функции y = f (x).Это легко сделать, используя формулу (17).То есть он временно представляет y’X с Z. А затем… ** ух-з» (17) Значение (18) Однако, поскольку Z = yx = — m、 / ГМ-ГМ Узнайте, наконец, из (18)и (19) Образцы. Установите вогнутое направление
кривой х =(* + 3Т + л> г = 2Т * — (21) В точке Af (l). Решение. Из (21), x’f = 2t + 3, x? = 2,г = г г! = 12 /.Итак, если t = 1, то это выглядит так:= jc / = 2, y ’ < = 6, yi =12.By формула (20) M 、_ 12.5-6-2 _ 48 А-Б ’ 125 ′ поскольку yk> 0, кривая точки M (21) направлена вогнутой поверхностью вверх.
Смотрите также:
Предмет высшая математика
Тема:
Представление
кривых линий в КГ
-
Параметрические уравнения
Кривые
можно представлять аналитически, т. е.
как график функции и графически.
Математики записывают это в виде: y =
f(x), что означает » у – это функция,
значение которой зависит от значения
х. Например, простейшая функция у = 2х
означает простую зависимость: каждое
значение у в два раза больше любого
значения х. График этой функции есть
прямая линия, проходящая через начало
координат (рис. 1.1).
Более
сложный вид представляют собой
тригонометрические функции, например
синусоида: у
= sin х
График
такой кривой известен каждому (рис.
1.2).
Рис.
1.1
График функции у = 2х
Рис.
1.2. График
функции у = sinx
Такой
способ представления функции и ее
графика называют явным. Он позволяет
относительно легко строить график.
Однако у этого способа с точки зрения
графического представления имеются
существенные недостатки.
-
Каждому значению
х
соответствует только одно значение
у.
Это не дает возможности начинать новый
фрагмент кривой в произвольном месте. -
Кривая не может
быть замкнутой.
В
результате явный способ представления
нельзя применять там, где требуется
описание произвольных кривых, размещаемых
в произвольных местах плоскости.
Альтернативный
способ — определение кривой как
параметрической функции.
У
такого способа обе координаты (х и у)
равноправны, т. е. обе координаты вычисляют
как функции некоторого вспомогательного
параметра, обозначаемого, часто символом
t. В общем случае такая зависимость
получает вид:
q(t)
= {x(t), y(t)},
где
х(t) и y(t)
– функции параметра t.
Задавая
одинаковые значения t, функция x(t)
вычисляет значения координаты х, а
функция y(t) – значения координаты у. Это
очень важная особенность задания
функции.
Знакомый
пример
Можно
представить, что значения параметра t
– это отсчеты времени, в течение которого
происходит перемещение определенной
частицы вдоль произвольной кривой,
например окружности. Параметрическая
функция q(t) позволит получать пары
координат {х, у} , по которым перемещается
точка в различные моменты (значения)
времени t. Хотя, в общем случае, не
обязательно параметр t связывать со
временем.
Второе
важное качество параметрических кривых
состоит в том, что они имеют более
разнообразные формы, чем это позволяют
явные уравнения.
Еще
пример.
Графики
синусоиды и косинусоиды в явном виде
не позволяют замкнуть линию, а две
параметрические функции
x(t)
= cost
y(t)
=
sint
создают окружность,
если t «пробегает» значения между
0 и 360 градусов.
Справка.
Параметрическое представление функции
– это выражение функциональной
зависимости между несколькими переменными
введением вспомогательных переменных,
которые принято называть «параметрами».
Если мы располагаем двумя переменными,
например, по оси х и по оси у, то зависимость
между ними можно рассматривать как
уравнение плоской кривой. Например,
координаты х и у точек этой кривой
определяются каким-то параметром,
скажем, величиной t, которую определяют
как некоторый диапазон непрерывных или
дискретных значений. Особенно важно
такое представление для пространственных
кривых, поскольку обеспечивает более
легкий способ построения графиков.
Применение
параметрических функций делает возможным
применять более сложные функции, а не
только линейную аппроксимацию, поскольку
один из основных недостатков аппроксимации
прямыми заключается в образовании
угловых изгибов, которые не создают
впечатления гладкости. Поэтому неизбежной
заменой прямолинейным сегментам могут
быть только кривые, которые способны
обеспечить требуемую гладкость (забегая
вперед, можно сказать, что речь идет о
кривых Безье и NURBS-кривых, наиболее часто
применяемых в компьютерной графике).
Но сначала более точно определим понятие
гладкости.
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
From Wikipedia, the free encyclopedia
![]()
In mathematics, a parametric equation defines a group of quantities as functions of one or more independent variables called parameters.[1] Parametric equations are commonly used to express the coordinates of the points that make up a geometric object such as a curve or surface, in which case the equations are collectively called a parametric representation,[2] or parametric system,[3] or parameterization (alternatively spelled as parametrisation) of the object.[1][4][5]
For example, the equations

form a parametric representation of the unit circle, where t is the parameter: A point (x, y) is on the unit circle if and only if there is a value of t such that these two equations generate that point. Sometimes the parametric equations for the individual scalar output variables are combined into a single parametric equation in vectors:

Parametric representations are generally nonunique (see the «Examples in two dimensions» section below), so the same quantities may be expressed by a number of different parameterizations.[1]
In addition to curves and surfaces, parametric equations can describe manifolds and algebraic varieties of higher dimension, with the number of parameters being equal to the dimension of the manifold or variety, and the number of equations being equal to the dimension of the space in which the manifold or variety is considered (for curves the dimension is one and one parameter is used, for surfaces dimension two and two parameters, etc.).
Parametric equations are commonly used in kinematics, where the trajectory of an object is represented by equations depending on time as the parameter. Because of this application, a single parameter is often labeled t; however, parameters can represent other physical quantities (such as geometric variables) or can be selected arbitrarily for convenience. Parameterizations are non-unique; more than one set of parametric equations can specify the same curve.[6]
Applications[edit]
Kinematics[edit]
In kinematics, objects’ paths through space are commonly described as parametric curves, with each spatial coordinate depending explicitly on an independent parameter (usually time). Used in this way, the set of parametric equations for the object’s coordinates collectively constitute a vector-valued function for position. Such parametric curves can then be integrated and differentiated termwise. Thus, if a particle’s position is described parametrically as

then its velocity can be found as

and its acceleration as
 .
.

Computer-aided design[edit]
Another important use of parametric equations is in the field of computer-aided design (CAD).[7] For example, consider the following three representations, all of which are commonly used to describe planar curves.
| Type | Form | Example | Description |
|---|---|---|---|
| Explicit | 
|

|
Line |
| Implicit | 
|

|
Circle |
| Parametric |  
|
 
|
Line |
 
|
Circle |
Each representation has advantages and drawbacks for CAD applications.
The explicit representation may be very complicated, or even may not exist. Moreover, it does not behave well under geometric transformations, and in particular under rotations. On the other hand, as a parametric equation and an implicit equation may easily be deduced from an explicit representation, when a simple explicit representation exists, it has the advantages of both other representations.
Implicit representations may make it difficult to generate points on the curve, and even to decide whether there are real points. On the other hand, they are well suited for deciding whether a given point is on a curve, or whether it is inside or outside of a closed curve.
Such decisions may be difficult with a parametric representation, but parametric representations are best suited for generating points on a curve, and for plotting it.[8]
Integer geometry[edit]
Numerous problems in integer geometry can be solved using parametric equations. A classical such solution is Euclid’s parametrization of right triangles such that the lengths of their sides a, b and their hypotenuse c are coprime integers. As a and b are not both even (otherwise a, b and c would not be coprime), one may exchange them to have a even, and the parameterization is then

where the parameters m and n are positive coprime integers that are not both odd.
By multiplying a, b and c by an arbitrary positive integer, one gets a parametrization of all right triangles whose three sides have integer lengths.
Implicitization[edit]
Converting a set of parametric equations to a single implicit equation involves eliminating the variable  from the simultaneous equations
from the simultaneous equations  This process is called implicitization. If one of these equations can be solved for t, the expression obtained can be substituted into the other equation to obtain an equation involving x and y only: Solving
This process is called implicitization. If one of these equations can be solved for t, the expression obtained can be substituted into the other equation to obtain an equation involving x and y only: Solving  to obtain
to obtain  and using this in
and using this in  gives the explicit equation
gives the explicit equation  while more complicated cases will give an implicit equation of the form
while more complicated cases will give an implicit equation of the form 
If the parametrization is given by rational functions

where p, q, r are set-wise coprime polynomials, a resultant computation allows one to implicitize. More precisely, the implicit equation is the resultant with respect to t of xr(t) – p(t) and yr(t) – q(t)
In higher dimensions (either more than two coordinates or more than one parameter), the implicitization of rational parametric equations may by done with Gröbner basis computation; see Gröbner basis § Implicitization in higher dimension.
To take the example of the circle of radius a, the parametric equations

can be implicitized in terms of x and y by way of the Pythagorean trigonometric identity:
As

and

we get

and thus

which is the standard equation of a circle centered at the origin.
Examples in two dimensions[edit]
Parabola[edit]
The simplest equation for a parabola,

can be (trivially) parameterized by using a free parameter t, and setting

Explicit equations[edit]
More generally, any curve given by an explicit equation

can be (trivially) parameterized by using a free parameter t, and setting

Circle[edit]
A more sophisticated example is the following. Consider the unit circle which is described by the ordinary (Cartesian) equation

This equation can be parameterized as follows:

With the Cartesian equation it is easier to check whether a point lies on the circle or not. With the parametric version it is easier to obtain points on a plot.
In some contexts, parametric equations involving only rational functions (that is fractions of two polynomials) are preferred, if they exist. In the case of the circle, such a rational parameterization is

With this pair of parametric equations, the point (−1, 0) is not represented by a real value of t, but by the limit of x and y when t tends to infinity.
Ellipse[edit]
An ellipse in canonical position (center at origin, major axis along the X-axis) with semi-axes a and b can be represented parametrically as

An ellipse in general position can be expressed as

as the parameter t varies from 0 to 2π. Here  is the center of the ellipse, and
is the center of the ellipse, and  is the angle between the
is the angle between the  -axis and the major axis of the ellipse.
-axis and the major axis of the ellipse.
Both parameterizations may be made rational by using the tangent half-angle formula and setting 
Lissajous curve[edit]

A Lissajous curve where  and
and  .
.
A Lissajous curve is similar to an ellipse, but the x and y sinusoids are not in phase. In canonical position, a Lissajous curve is given by

where  and
and  are constants describing the number of lobes of the figure.
are constants describing the number of lobes of the figure.
Hyperbola[edit]
An east-west opening hyperbola can be represented parametrically by
- Failed to parse (SVG (MathML can be enabled via browser plugin): Invalid response («Math extension cannot connect to Restbase.») from server «/mathoid/local/v1/»:): {displaystyle begin{align} x &= asec t + h \ y &= btan t + k end{align}quad}
or, rationally

A north-south opening hyperbola can be represented parametrically as
- or, rationally


In all these formulae (h, k) are the center coordinates of the hyperbola, a is the length of the semi-major axis, and b is the length of the semi-minor axis.
Hypotrochoid[edit]
A hypotrochoid is a curve traced by a point attached to a circle of radius r rolling around the inside of a fixed circle of radius R, where the point is at a distance d from the center of the interior circle.
-

A hypotrochoid for which r = d
-
A hypotrochoid for which R = 5, r = 3, d = 5


The parametric equations for the hypotrochoids are:

Some sophisticated functions[edit]
Other examples are shown:
![{displaystyle {begin{aligned}x&=[a-b]cos(t) +bcos left[tleft({frac {a}{b}}-1right)right]\y&=[a-b]sin(t) -bsin left[tleft({frac {a}{b}}-1right)right], k={frac {a}{b}}end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/9f4620f83a90c7e5323d21bc2697bcb3aa3dae35)

Several graphs by variation of k








Examples in three dimensions[edit]
Animated Parametric helix
Helix[edit]

Parametric equations are convenient for describing curves in higher-dimensional spaces. For example:

describes a three-dimensional curve, the helix, with a radius of a and rising by 2πb units per turn. The equations are identical in the plane to those for a circle.
Such expressions as the one above are commonly written as

where r is a three-dimensional vector.
Parametric surfaces[edit]
A torus with major radius R and minor radius r may be defined parametrically as

where the two parameters t and u both vary between 0 and 2π.
-

R = 2, r = 1/2
As u varies from 0 to 2π the point on the surface moves about a short circle passing through the hole in the torus. As t varies from 0 to 2π the point on the surface moves about a long circle around the hole in the torus.
Example with vectors[edit]
The parametric equation of the line through the point  and parallel to the vector
and parallel to the vector  is[9]
is[9]

Underdetermined linear systems[edit]
A system of m linear equations in n unknowns is underdetermined if it has more than one solution. This occurs when the matrix of the system and its augmented matrix have the same rank r and r < m. In this case, one can select m − r unknowns as parameters and represent all solutions as a parametric equation where all unknowns are expressed as linear combinations of the selected ones. That is, if the unknowns are  one can reorder them for expressing the solutions as[10]
one can reorder them for expressing the solutions as[10]

Such a parametric equation is called a parametric form of the solution of the system.[10]
The standard method for computing a parametric form of the solution it to use Gaussian elimination for computing a reduced row echelon form of the augmented matrix. Then the unknowns that can be used as parameters are the ones that correspond to columns not containing any leading entry (that is the left most non zero entry in a row or the matrix), and the parametric form can be straightforwardly deduced.[10]
See also[edit]
- Curve
- Parametric estimating
- Position vector
- Vector-valued function
- Parametrization by arc length
- Parametric derivative
Notes[edit]
- ^ a b c Weisstein, Eric W. «Parametric Equations». MathWorld.
- ^ Kreyszig, Erwin (1972). Advanced Engineering Mathematics (3rd ed.). New York: Wiley. pp. 291, 342. ISBN 0-471-50728-8.
- ^ Burden, Richard L.; Faires, J. Douglas (1993). Numerical Analysis (5th ed.). Boston: Brookes/Cole. p. 149. ISBN 0-534-93219-3.
- ^ Thomas, George B.; Finney, Ross L. (1979). Calculus and Analytic Geometry (fifth ed.). Addison-Wesley. p. 91.
- ^ Nykamp, Duane. «Plane parametrization example». mathinsight.org. Retrieved 2017-04-14.
- ^ Spitzbart, Abraham (1975). Calculus with Analytic Geometry. Gleview, IL: Scott, Foresman and Company. ISBN 0-673-07907-4. Retrieved August 30, 2015.
- ^ Stewart, James (2003). Calculus (5th ed.). Belmont, CA: Thomson Learning, Inc. pp. 687–689. ISBN 0-534-39339-X.
- ^ Shah, Jami J.; Martti Mantyla (1995). Parametric and feature-based CAD/CAM: concepts, techniques, and applications. New York, NY: John Wiley & Sons, Inc. pp. 29–31. ISBN 0-471-00214-3.
- ^ Calculus: Single and Multivariable. John Wiley. 2012-10-29. p. 919. ISBN 9780470888612. OCLC 828768012.
- ^ a b c
Anton, Howard; Rorres, Chris (2014) [1973]. «1.2 Gaussian Elimination». Elementary Linear Algebra (11th ed.). Wiley. pp. 11–24.
External links[edit]
- Graphing Software at Curlie
- Web application to draw parametric curves on the plane
From Wikipedia, the free encyclopedia
![]()
In mathematics, a parametric equation defines a group of quantities as functions of one or more independent variables called parameters.[1] Parametric equations are commonly used to express the coordinates of the points that make up a geometric object such as a curve or surface, in which case the equations are collectively called a parametric representation,[2] or parametric system,[3] or parameterization (alternatively spelled as parametrisation) of the object.[1][4][5]
For example, the equations
form a parametric representation of the unit circle, where t is the parameter: A point (x, y) is on the unit circle if and only if there is a value of t such that these two equations generate that point. Sometimes the parametric equations for the individual scalar output variables are combined into a single parametric equation in vectors:
Parametric representations are generally nonunique (see the «Examples in two dimensions» section below), so the same quantities may be expressed by a number of different parameterizations.[1]
In addition to curves and surfaces, parametric equations can describe manifolds and algebraic varieties of higher dimension, with the number of parameters being equal to the dimension of the manifold or variety, and the number of equations being equal to the dimension of the space in which the manifold or variety is considered (for curves the dimension is one and one parameter is used, for surfaces dimension two and two parameters, etc.).
Parametric equations are commonly used in kinematics, where the trajectory of an object is represented by equations depending on time as the parameter. Because of this application, a single parameter is often labeled t; however, parameters can represent other physical quantities (such as geometric variables) or can be selected arbitrarily for convenience. Parameterizations are non-unique; more than one set of parametric equations can specify the same curve.[6]
Applications[edit]
Kinematics[edit]
In kinematics, objects’ paths through space are commonly described as parametric curves, with each spatial coordinate depending explicitly on an independent parameter (usually time). Used in this way, the set of parametric equations for the object’s coordinates collectively constitute a vector-valued function for position. Such parametric curves can then be integrated and differentiated termwise. Thus, if a particle’s position is described parametrically as
then its velocity can be found as
and its acceleration as
- .
Computer-aided design[edit]
Another important use of parametric equations is in the field of computer-aided design (CAD).[7] For example, consider the following three representations, all of which are commonly used to describe planar curves.
| Type | Form | Example | Description |
|---|---|---|---|
| Explicit |
|
|
Line |
| Implicit |
|
|
Circle |
| Parametric |
|
|
Line |
|
|
Circle |
Each representation has advantages and drawbacks for CAD applications.
The explicit representation may be very complicated, or even may not exist. Moreover, it does not behave well under geometric transformations, and in particular under rotations. On the other hand, as a parametric equation and an implicit equation may easily be deduced from an explicit representation, when a simple explicit representation exists, it has the advantages of both other representations.
Implicit representations may make it difficult to generate points on the curve, and even to decide whether there are real points. On the other hand, they are well suited for deciding whether a given point is on a curve, or whether it is inside or outside of a closed curve.
Such decisions may be difficult with a parametric representation, but parametric representations are best suited for generating points on a curve, and for plotting it.[8]
Integer geometry[edit]
Numerous problems in integer geometry can be solved using parametric equations. A classical such solution is Euclid’s parametrization of right triangles such that the lengths of their sides a, b and their hypotenuse c are coprime integers. As a and b are not both even (otherwise a, b and c would not be coprime), one may exchange them to have a even, and the parameterization is then
where the parameters m and n are positive coprime integers that are not both odd.
By multiplying a, b and c by an arbitrary positive integer, one gets a parametrization of all right triangles whose three sides have integer lengths.
Implicitization[edit]
Converting a set of parametric equations to a single implicit equation involves eliminating the variable from the simultaneous equations This process is called implicitization. If one of these equations can be solved for t, the expression obtained can be substituted into the other equation to obtain an equation involving x and y only: Solving to obtain and using this in gives the explicit equation while more complicated cases will give an implicit equation of the form
If the parametrization is given by rational functions
where p, q, r are set-wise coprime polynomials, a resultant computation allows one to implicitize. More precisely, the implicit equation is the resultant with respect to t of xr(t) – p(t) and yr(t) – q(t)
In higher dimensions (either more than two coordinates or more than one parameter), the implicitization of rational parametric equations may by done with Gröbner basis computation; see Gröbner basis § Implicitization in higher dimension.
To take the example of the circle of radius a, the parametric equations
can be implicitized in terms of x and y by way of the Pythagorean trigonometric identity:
As
and
we get
and thus
which is the standard equation of a circle centered at the origin.
Examples in two dimensions[edit]
Parabola[edit]
The simplest equation for a parabola,
can be (trivially) parameterized by using a free parameter t, and setting
Explicit equations[edit]
More generally, any curve given by an explicit equation
can be (trivially) parameterized by using a free parameter t, and setting
Circle[edit]
A more sophisticated example is the following. Consider the unit circle which is described by the ordinary (Cartesian) equation
This equation can be parameterized as follows:
With the Cartesian equation it is easier to check whether a point lies on the circle or not. With the parametric version it is easier to obtain points on a plot.
In some contexts, parametric equations involving only rational functions (that is fractions of two polynomials) are preferred, if they exist. In the case of the circle, such a rational parameterization is
With this pair of parametric equations, the point (−1, 0) is not represented by a real value of t, but by the limit of x and y when t tends to infinity.
Ellipse[edit]
An ellipse in canonical position (center at origin, major axis along the X-axis) with semi-axes a and b can be represented parametrically as
An ellipse in general position can be expressed as
as the parameter t varies from 0 to 2π. Here is the center of the ellipse, and is the angle between the -axis and the major axis of the ellipse.
Both parameterizations may be made rational by using the tangent half-angle formula and setting
Lissajous curve[edit]
A Lissajous curve where and .
A Lissajous curve is similar to an ellipse, but the x and y sinusoids are not in phase. In canonical position, a Lissajous curve is given by
where and are constants describing the number of lobes of the figure.
Hyperbola[edit]
An east-west opening hyperbola can be represented parametrically by
- Failed to parse (SVG (MathML can be enabled via browser plugin): Invalid response («Math extension cannot connect to Restbase.») from server «/mathoid/local/v1/»:): {displaystyle begin{align} x &= asec t + h \ y &= btan t + k end{align}quad}
or, rationally
A north-south opening hyperbola can be represented parametrically as
- or, rationally
In all these formulae (h, k) are the center coordinates of the hyperbola, a is the length of the semi-major axis, and b is the length of the semi-minor axis.
Hypotrochoid[edit]
A hypotrochoid is a curve traced by a point attached to a circle of radius r rolling around the inside of a fixed circle of radius R, where the point is at a distance d from the center of the interior circle.
-
A hypotrochoid for which r = d
-
A hypotrochoid for which R = 5, r = 3, d = 5
The parametric equations for the hypotrochoids are:
Some sophisticated functions[edit]
Other examples are shown:
Several graphs by variation of k
Examples in three dimensions[edit]
Animated Parametric helix
Helix[edit]
Parametric equations are convenient for describing curves in higher-dimensional spaces. For example:
describes a three-dimensional curve, the helix, with a radius of a and rising by 2πb units per turn. The equations are identical in the plane to those for a circle.
Such expressions as the one above are commonly written as
where r is a three-dimensional vector.
Parametric surfaces[edit]
A torus with major radius R and minor radius r may be defined parametrically as
where the two parameters t and u both vary between 0 and 2π.
-
R = 2, r = 1/2
As u varies from 0 to 2π the point on the surface moves about a short circle passing through the hole in the torus. As t varies from 0 to 2π the point on the surface moves about a long circle around the hole in the torus.
Example with vectors[edit]
The parametric equation of the line through the point and parallel to the vector is[9]
Underdetermined linear systems[edit]
A system of m linear equations in n unknowns is underdetermined if it has more than one solution. This occurs when the matrix of the system and its augmented matrix have the same rank r and r < m. In this case, one can select m − r unknowns as parameters and represent all solutions as a parametric equation where all unknowns are expressed as linear combinations of the selected ones. That is, if the unknowns are one can reorder them for expressing the solutions as[10]
Such a parametric equation is called a parametric form of the solution of the system.[10]
The standard method for computing a parametric form of the solution it to use Gaussian elimination for computing a reduced row echelon form of the augmented matrix. Then the unknowns that can be used as parameters are the ones that correspond to columns not containing any leading entry (that is the left most non zero entry in a row or the matrix), and the parametric form can be straightforwardly deduced.[10]
See also[edit]
- Curve
- Parametric estimating
- Position vector
- Vector-valued function
- Parametrization by arc length
- Parametric derivative
Notes[edit]
- ^ a b c Weisstein, Eric W. «Parametric Equations». MathWorld.
- ^ Kreyszig, Erwin (1972). Advanced Engineering Mathematics (3rd ed.). New York: Wiley. pp. 291, 342. ISBN 0-471-50728-8.
- ^ Burden, Richard L.; Faires, J. Douglas (1993). Numerical Analysis (5th ed.). Boston: Brookes/Cole. p. 149. ISBN 0-534-93219-3.
- ^ Thomas, George B.; Finney, Ross L. (1979). Calculus and Analytic Geometry (fifth ed.). Addison-Wesley. p. 91.
- ^ Nykamp, Duane. «Plane parametrization example». mathinsight.org. Retrieved 2017-04-14.
- ^ Spitzbart, Abraham (1975). Calculus with Analytic Geometry. Gleview, IL: Scott, Foresman and Company. ISBN 0-673-07907-4. Retrieved August 30, 2015.
- ^ Stewart, James (2003). Calculus (5th ed.). Belmont, CA: Thomson Learning, Inc. pp. 687–689. ISBN 0-534-39339-X.
- ^ Shah, Jami J.; Martti Mantyla (1995). Parametric and feature-based CAD/CAM: concepts, techniques, and applications. New York, NY: John Wiley & Sons, Inc. pp. 29–31. ISBN 0-471-00214-3.
- ^ Calculus: Single and Multivariable. John Wiley. 2012-10-29. p. 919. ISBN 9780470888612. OCLC 828768012.
- ^ a b c
Anton, Howard; Rorres, Chris (2014) [1973]. «1.2 Gaussian Elimination». Elementary Linear Algebra (11th ed.). Wiley. pp. 11–24.
External links[edit]
- Graphing Software at Curlie
- Web application to draw parametric curves on the plane